AI YardMaster: Year-Round Lawn & Snow Maintenance AI yard machine for precise pattern mowing, snow removal, and eco-friendly selective chemical application.
“Exploring AI Text-to-Speech and Audio Systems for Robotics | Showcasing Control Panel Progress as of 9/7 | Testing Sound Quality of My Welded and Engineered Steel Box Stereo Speaker System, Acoustically Tuned for Speech and Integrated into the Robot”
AI Algorithm Reviewed My Engineering Notes and Delivered a Self-Introduction via Integrated Audio System Using the Python-Based Text-to-Speech Engine
Story Forward-Thinking Design: The AI YardMaster is my proactive solution for future lawn and snow maintenance on the 5-acre land I’m developing. This autonomous robot merges my love for tech with practicality, designed to handle the expansive area with precision and care.
Conceived for Convenience: Anticipating the maintenance of my future home, I designed the AI YardMaster to tackle tasks with efficiency, sparing me hours of manual labor. It will mow and snow-blow autonomously, guided by AI and GPS to navigate planned landscapes and driveways without harming hidden shrubs beneath the snow.
Efficient and Intelligent: With a suite of sensors and advanced algorithms, the AI YardMaster will execute detailed mowing patterns and precise snow removal. This ensures a well-kept land year-round, without the time and physical demands of traditional methods.
The Learning Curve: Developing this robot is a journey into AI and robotics, advancing my skills and bringing me closer to a future where technology enhances our interaction with nature.
Conclusion: The AI YardMaster isn’t just a yard tool; it’s a step into a future of intelligent living, where my time is valued, and technology works hand in hand with the environment.
Things used in this project
Test fitting the mower and rover together
Sprockets for Steering Control: Stepper Sprocket, Tensioners sprocket, 10-Bit Encoder Gears, and Drive Sprocket in motion.
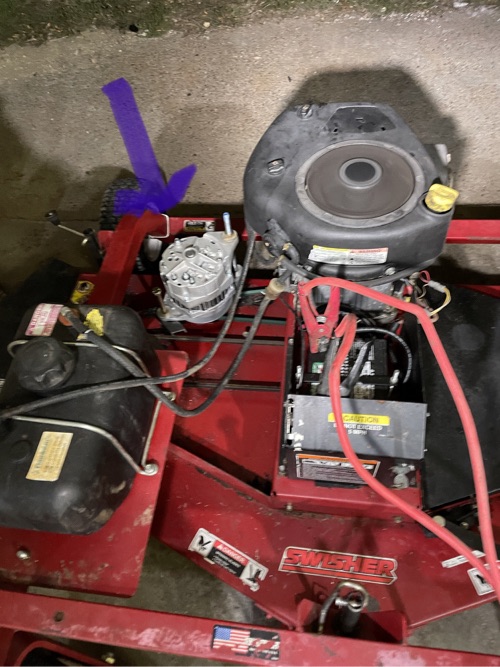
Encoder gear setup 1:2 ratio I added a 70Amp 24 VDC alternator to the mower engine , this is to power the robots electric drive train and computers/controllersI welded the old mower base, removed the wheels, and added brackets for mounting to the rover robot; repurposed it as a harness to attach the mower as an accessory. Also integrated automated deck height control for enhanced functionality. Just finished painting the harness here.Starting to assemble – front Back side. Starting to assemble Installed and ran conduits, pulled wiring, and added nighttime lighting along with safety and signal lights. Completed wiring for the motor, encoder, and stepper motor, and shielded the various data circuits from EMF on the chassis.
Experimental prototype design with electric suspension tire system maintaining power and sensor wire tension despite tire suspension pressure.
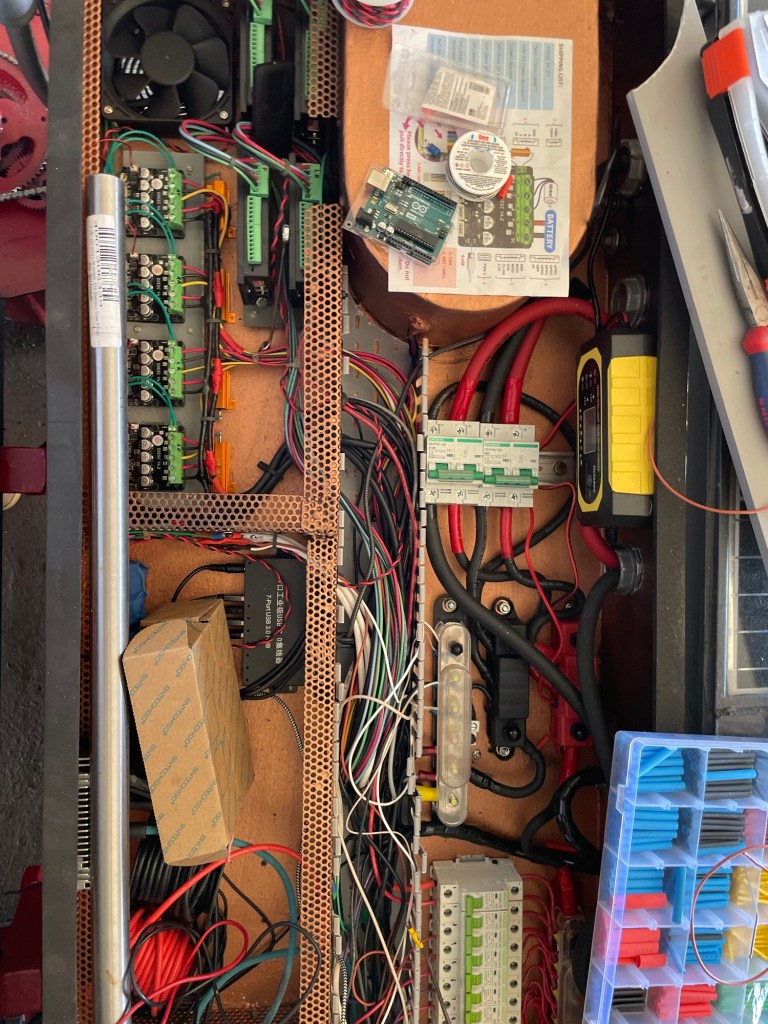
Some of the early robot electronics control and power distribution progress. Electric synchronized four-corner screw jack system, designed using recycled parts from my old factory, lifting the robot for design, calibration, and maintenance.
Built from recycled parts, this screw jack system features a 1/3 HP farm duty motor at 1750 RPM with a 47:1 speed reducer and six gearboxes. The pulley setup includes a 2” motor shaft pulley, 6” input speed reducer pulley, 4.25” speed reducer output pulley, and a 5.25” jack input pulley. Initially, I tried a 1 HP motor, but it wasn’t enough power, so I reverted to the 1/3 HP motor and added a used speed reducer, effectively increasing torque. After a few revisions and additional parts, the system now works as intended. It lifts 1 inch per minute, providing 50 ft-lbs of torque to safely lift an 800-pound robot. With partial welding, the total lifting capacity is derated to 15,456 pounds, well strong enough to support my ~800-pound project. This video briefly shows the power transmission in action, demonstrating efficient torque conversion and control.Fully suspended by the screw jack system I designed and built, now ready for wheel alignment and controls calibration.
9/5/24 Calibrating the motor controllers and hall sensors to ensure smooth and accurate wheel movement. The tires are spinning into action as the system gets ready for precise operation.